Первый в мире летающий микроробот


Изобретение микророботов предоставляет исследователям больше контроля над микросредой, позволяя им перемещать и устанавливать крошечные объекты с намного большей точностью.
Берад Камези, руководитель Лаборатории микроробототехники на магнитной левитации при университете Ватерлоо возглавляет группу исследователей, которая разработала прототип летающей МикроЭлектроМеханической системы (MEMS).
Микроробот преодолевает силу гравитации посредством левитации, питаемой от магнитного поля. Он движется и манипулирует объектами с помощью магнитов, прикреплённых к микрозахватам. Робот управляется дистанционно сфокусированным лазерным лучом.
Его можно использовать для микро-манипулирования, технологии, которая требует точной установки микро объектов. Микро-манипулирование включает микро-сбор механических деталей, обработку биологических образцов и даже микрохирургию.
По словам разработчиков, робота можно поместить в любое замкнутое пространство и управлять им может человек, находящийся снаружи, что делает его идеальным для обращения с биологически опасными материалами или для работы в вакуумных камерах и стерильных комнатах.
Магнитная левитация применяется для помещения микроробота в трёхмерное пространство, в этом задействован внешний механизм с электромагнитным приводом. Механизм управляет этим магнитным полем, взаимодействуя с позиционными датчиками.
Т.к. питание подаётся внешним образом, микророботу не нужен источник энергии или регулятор, который повлиял бы на его манёвренность.
Благодаря магнитной левитации микроробот с лёгкостью приземляется на сложные поверхности – основное преимущество над ползающими или шагающими роботами. Кроме того, благодаря тому, что робот умеет летать, он избегает силы трения и сцепления.
Он обладает высокой манёвренностью, потому что функционирует без таких механических деталей как соединительные консоли и провода. Свободное от пыли движение и удобство использования в замкнутой среде – дополнительные ключевые особенности микроробота.

(Фото: Image courtesy of University of Waterloo)
Комментарии:

Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Арены будущего: 3 крутых проекта футбольных стадионов в Саудовской Аравии
В Populous утверждают, что для нового проекта вдохновлялись пейзажами Саудовской Аравии. Дизайн напоминает форму семени, прорастающего в пустыне.

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.
«Квантовая суперхимия» впервые наблюдалась в лабораторных экспериментах
Ученые из Чикагского университета обнаружили первое свидетельство явления под названием «квантовая суперхимия». Давно предсказанный, но так и не подтвержденный, этот эффект может ускорить химические реакции, дать ученым больше контроля над ними и послужить основой для квантовых вычислений.
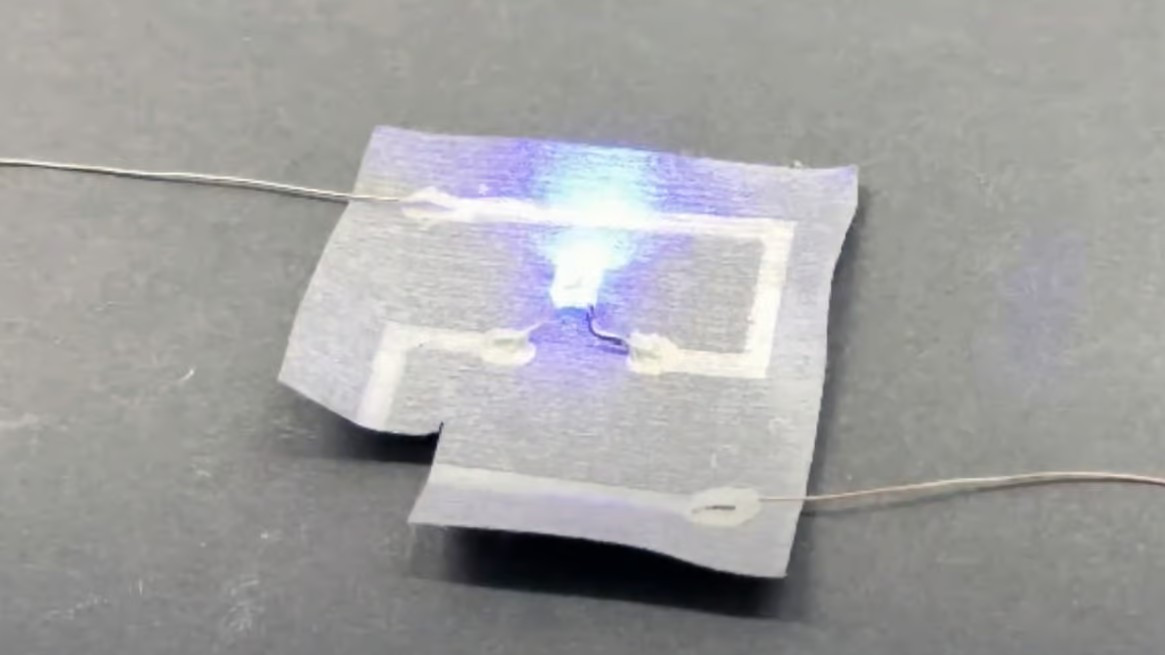
Умная ткань с покрытием из жидкого металла «заживает» при порезах и отталкивает бактерии
Наука продолжает развивать умные ткани, которые реагируют на изменения окружающей среды и предоставляют больше «услуг» своим владельцам.
Лазер обнаруживает и идентифицирует бактерий за считанные минуты
Чтобы увидеть, какой тип бактерий присутствуют в образце жидкости, необходимо выращивать бактериальные культуры в лаборатории в течение нескольких часов или даже дней. Новая лазерная техника работает всего за несколько минут.

Ультратонкое покрытие делает солнечные батареи самоочищающимися
Солнечные панели не могут эффективно работать когда грязные, но их регулярная очистка может занять много времени. Инженеры в Германии разработали ультратонкое покрытие, которое сделает солнечные панели и другие поверхности самоочищающимися.
