HAMR-JR - один из самых маленьких и быстрых роботов


Оригинальный HAMR (Harvard Ambulatory MicroRobot) длиной
всего 4,4 см (1,7 дюйма) и использует четыре ножки с керамическим приводом для
перемещения со скоростью до 8,4 длин тела в секунду.
Он был построен с помощью метода производства печатных плат
микроэлектромеханических систем (PC-MEMS) Гарварда. Это включает в себя
изготовление плоского листа микрослоистого материала, а затем с помощью лазера деление
этого листа на узоры. Различные панели, составляющие эти узоры, соединены
гибкими шарнирами. Это позволяет складывать панели в трехмерные фигуры.
Чтобы построить HAMR-JR, ученые просто сократили двухмерный рисунок, а также приводы ног и интегральные схемы. Питание подается через проводной внешний источник.
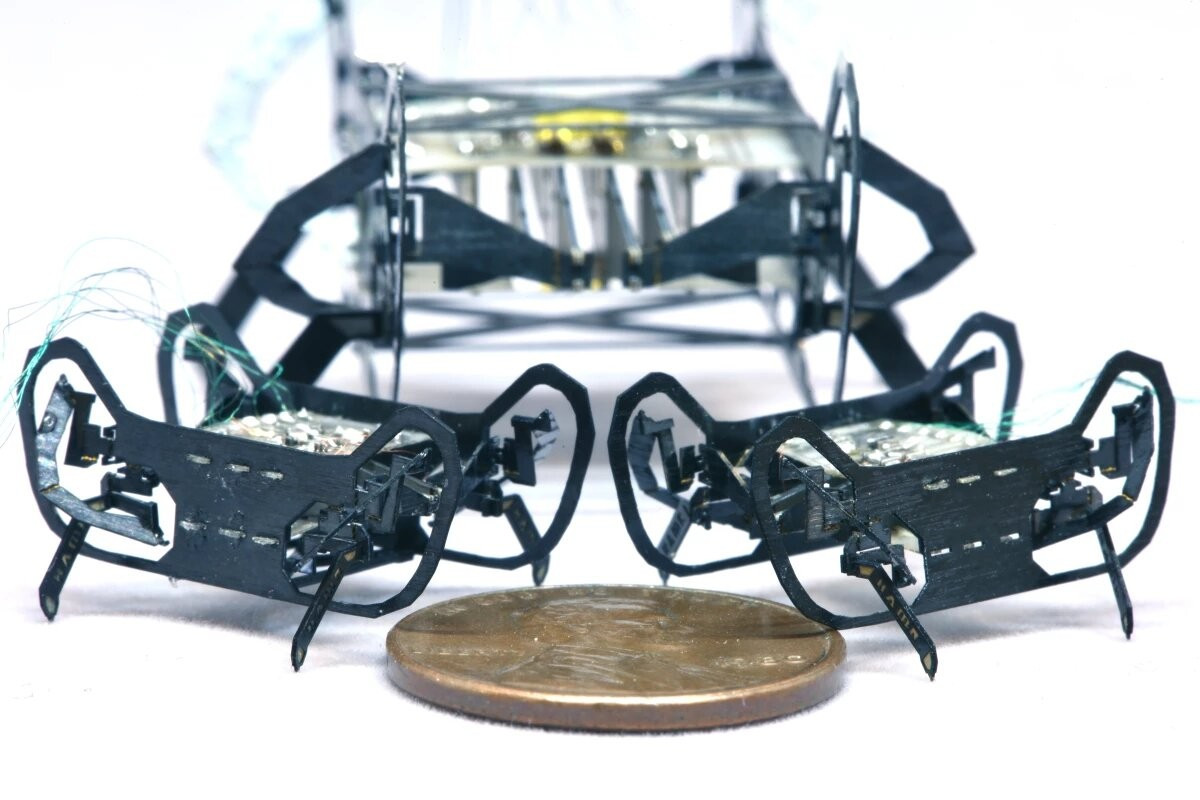
Получившийся робот в длину всего 2,25 см (0,9 дюйма) и весит 0,3 грамма. Тем не менее, его максимальная скорость выше, чем у оригинала, и составляет около 14 длин тела в секунду. Он также может прыгать, нести полезные грузы тяжелее себя и поворачиваться на месте.
«Большинство роботов такого масштаба довольно просты и демонстрируют только базовую мобильность», - говорит Каушик Джаярам, ??первый автор статьи об исследовании. «Мы показали, что нет необходимости ограничивать ловкость или контролировать размер».
Комментарии:

Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Арены будущего: 3 крутых проекта футбольных стадионов в Саудовской Аравии
В Populous утверждают, что для нового проекта вдохновлялись пейзажами Саудовской Аравии. Дизайн напоминает форму семени, прорастающего в пустыне.

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.

Техника Lenovo: надежность и долговечность при эксплуатации
Покупка технического устройства - это процесс, в котором важно учитывать различные нюансы, напрямую связанные с базовыми характеристиками приспособления и его функциональностью.

Лучшие модели наушников JBL: обзор и характеристики
JBL наушники широко известны высоким качеством звука и надёжностью, благодаря чему они завоевали доверие различных категорий пользователей — от меломанов до спортсменов.

e-Learning в цифрах: 6 общих фактов, много данных и прогнозы на ближайшее будущее
e-Learning – это обучение с помощью цифровых технологий (Интернета, электронных устройств и специальных программ). Процесс можно организовать в аудиториях или удалённо, одновременно для целой группы или по гибкому графику для каждого.
Компьютерный чип со встроенной тканью человеческого мозга получает финансирование от военных
В прошлом году ученые из Университета Монаша создали «DishBrain» — полубиологический компьютерный чип, в электродах которого в лаборатории выращено около 800 000 клеток мозга человека и мыши. Демонстрируя что-то вроде разума, он научился играть в пинг-понг за 5 минут.
