Канадский робот Декстр ремонтирует МКС


Декстр является частью мобильной обслуживающей системы Canadarm 2 на МКС, который осуществляет всевозможные задачи, связанные со сборкой и обслуживанием орбитальной станции. Робототехнический комплекс Canadarm 2 перемещает оборудование и материалы в пределах станции, помогает астронавтам работать в открытом космосе и обслуживает инструменты, оборудование и другую полезную нагрузку, находящиеся на поверхности МКС.

На фото робот Декстр.
Робот-манипулятор Декстр, которого также называют "Канадской рукой" оснащен двумя подвижными, можно даже сказать "гибкими" руками длиной в 3,35 м. Трёх с половиной метровый корпус имеет ось вращения в «талии». С одного конца Декстр оборудован захватывающим приспособлением, за которое его может ухватить система Canadarm 2 и перенести его в любую часть МКС. С другого конца корпуса есть исполнительный элемент робота, идентичный элементу комплекса Canadarm 2. Благодаря этому, Декстр может быть закреплён на захватывающих приспособлениях МКС или же может использоваться для расширения функциональности системы Canadarm 2.
Обе руки Декстра имеют семь "суставов", что придаёт повышенную гибкость и четкость выполнения работы. На конце каждой руки-манипулятора находится система, названная Механизм замены инструментов. В неё входят встроенные цепкие захваты, выдвижная головка, монохромная телевизионная камера, подсветка, и разделяемый соединитель, который обеспечивает питание, обмен данными и видеонаблюдение за полезным грузом МКС. У Декстра есть даже "кобура" с тремя различными инструментами для выполнения всевозможных задач по ремонту и тд.
Комментарии:

Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Арены будущего: 3 крутых проекта футбольных стадионов в Саудовской Аравии
В Populous утверждают, что для нового проекта вдохновлялись пейзажами Саудовской Аравии. Дизайн напоминает форму семени, прорастающего в пустыне.

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.
Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Причины роста популярности Астрономии и Космоса среди молодого поколения
Астрономия и космос всегда привлекали внимание людей всех возрастов, но особенно ярко эта наука проявляется среди молодого поколения.
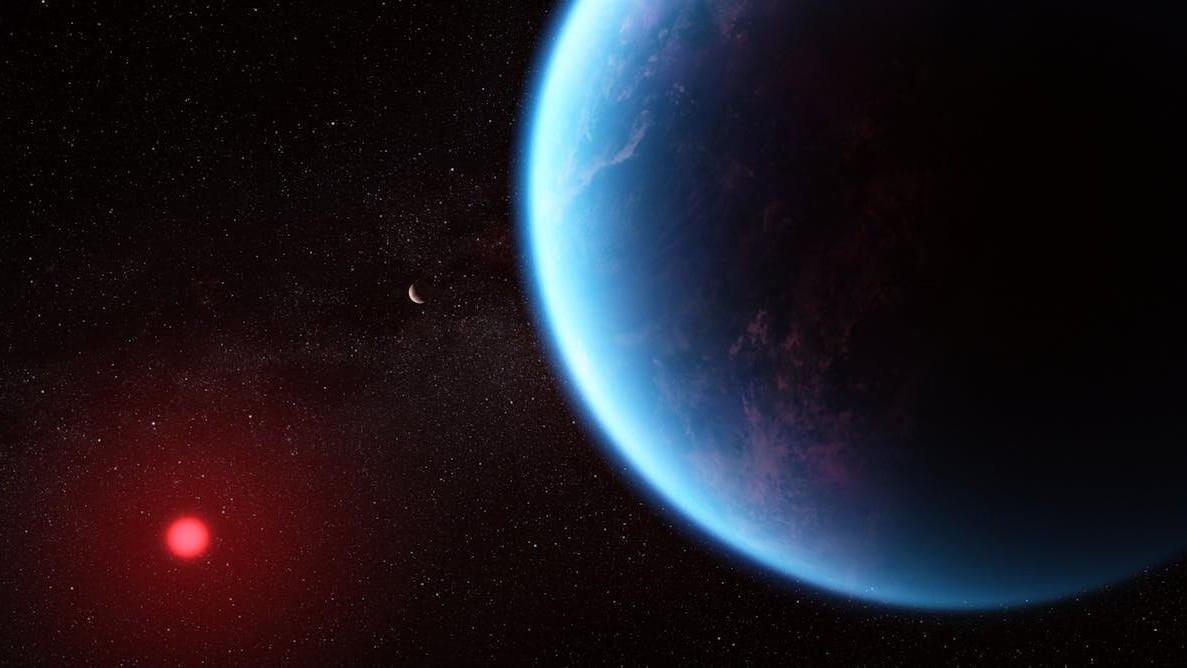
На далекой планете обнаружены намеки на жизнь
Данные космического телескопа Джеймса Уэбба (JWST) показали, что у экзопланеты вокруг звезды в созвездии Льва есть химические маркеры, которые на Земле связаны с живыми организмами. Но это смутные указания. Так насколько же вероятно, что на этой экзопланете обитает инопланетная жизнь?

Хищна черная дыра поедает звезду огромными кусками
Расположенная в соседней галактике солнцеподобная звезда постепенно съедается небольшой, но прожорливой черной дырой, теряя при каждом сближении с ней массу, эквивалентную трем Землям.
