Жить и работать на луне


.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
Комментарии:

sajpКаждый комплект из шести колёс может вращаться автономно в любом направлении, позволяя вездеходу двигаться в стороны, вперёд, назад – в любо направлении.
исправлено)

Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Арены будущего: 3 крутых проекта футбольных стадионов в Саудовской Аравии
В Populous утверждают, что для нового проекта вдохновлялись пейзажами Саудовской Аравии. Дизайн напоминает форму семени, прорастающего в пустыне.

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.
Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Причины роста популярности Астрономии и Космоса среди молодого поколения
Астрономия и космос всегда привлекали внимание людей всех возрастов, но особенно ярко эта наука проявляется среди молодого поколения.
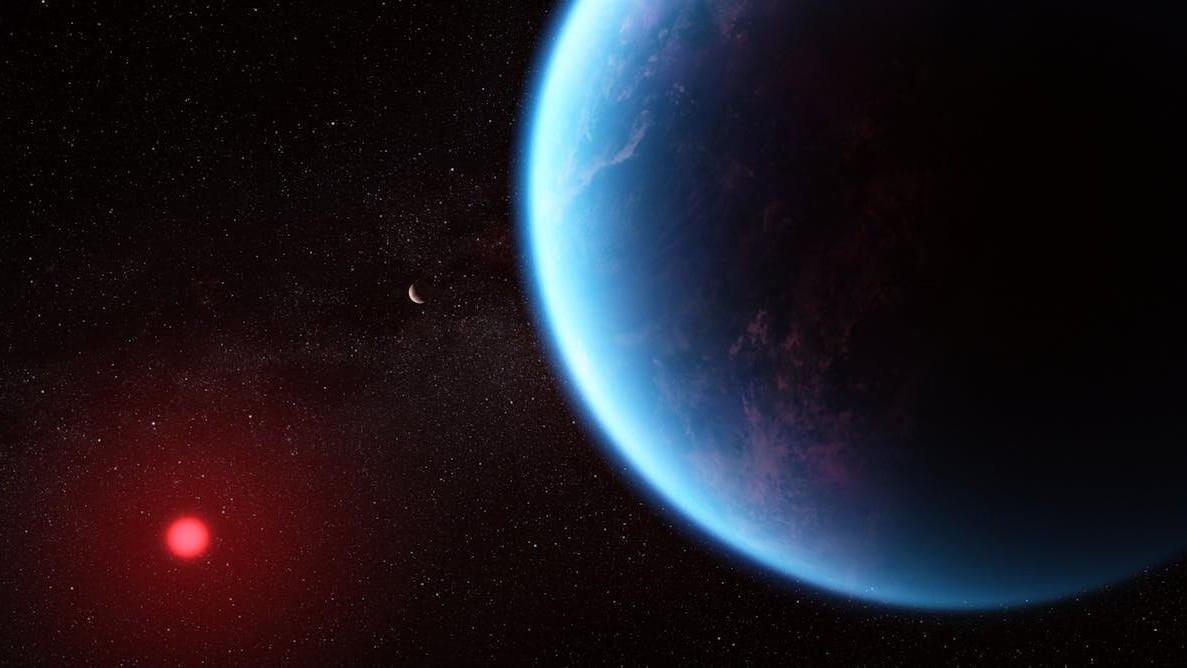
На далекой планете обнаружены намеки на жизнь
Данные космического телескопа Джеймса Уэбба (JWST) показали, что у экзопланеты вокруг звезды в созвездии Льва есть химические маркеры, которые на Земле связаны с живыми организмами. Но это смутные указания. Так насколько же вероятно, что на этой экзопланете обитает инопланетная жизнь?

Хищна черная дыра поедает звезду огромными кусками
Расположенная в соседней галактике солнцеподобная звезда постепенно съедается небольшой, но прожорливой черной дырой, теряя при каждом сближении с ней массу, эквивалентную трем Землям.
