Амбициозный проект ExoMars: Европа и Россия объединяют усилия для доставки ровера на Красную планету


Вне зависимости от того, насколько удачно сложится судьба марсохода «Curiosity», сумеет ли он приблизить человечество к пониманию прошлого и настоящего «Красной планеты», ученые твердо намерены продолжать исследования Марса с помощью новых и в чем-то еще более совершенных аппаратов, которые должны будут отправиться к нашему космическому соседу уже через несколько лет.
Из числа существующих программ по доставке на Марс автономных роверов стоит выделить миссию, в подготовке к которой, будем надеяться, примут участие и российские специалисты. Речь пойдет о совместном российско-европейском проекте ExoMars: за его практическую реализацию отвечают два крупнейших на континенте космических агентства: ESA (European Space Agency) и Федеральное космическое агентство «Роскосмос».

Исследование Марса – задача весьма амбициозная, а особых успехов в отечественной космической отрасли в последние годы не наблюдается. Можно вспомнить затонувший не столь уж и давно в океане «Фобос-грунт», направлявшийся, кстати, к одному из спутников Марса - достигнуть самой «Красной планеты» и высадить на ней марсоход будет еще сложнее.
Все это говорит о том, что вряд ли Роскосмос в одиночку потянул бы настолько сложный и серьезный проект. Впрочем, текущей весной стало известно, что договоренности с партнером по ExoMars наконец приобретают четкие очертания. В марте представители обоих агентств подписали соглашение, которое разграничивает сферы обязанностей двух сторон, а проще говоря – показывает, кто и чем будет заниматься в процессе предстоящей работы над программой.

В первую очередь, необходимо отметить тот факт, что проект ExoMars представляет собой комплексную, то есть составную миссию. Программа складывается из двух этапов: подготовительно-разведывательного и финального. На первом этапе предусмотрен запуск орбитального аппарата-носителя Trace Gas Orbiter (TGO) с демонстрационным посадочным модулем Entry, Descent and Landing Demonstrator Module (EDM) на борту. А еще через два года предполагается отправить к Марсу уже и сам ровер вместе со всеми необходимыми для его успешной доставки на поверхность планеты модулями.
.jpg)
Европейское космическое агентство спроектирует и сконструирует как орбитальный разведчик TGO и тестовый спускаемый модуль EDM, так и проделает основную работу над созданием марсохода. Впрочем, и Роскосмосу в проекте ExoMars отведена важная роль: российская сторона займется разработкой спускаемого модуля для марсохода и наземной платформы, а также, согласно текущим планам, обеспечит программу ракетоносителями на каждом из этапов.
Обе организации будут снабжать совместный проект научным оборудованием, а после доставки на Марс ровера, надо полагать, станут тесно сотрудничать в процессе исследования все еще во многом загадочной для нас планеты.
История проекта ExoMars
Прежде чем перейти к более подробному рассказу о концепции проекта ExoMars, остановимся на некоторых деталях, дающих нам представление о непростой истории этой космической миссии. О собственной программе по изучению Марса в Европе заговорили еще в 2005 году: тогда, в рамках масштабной космической инициативы «Aurora» и было выдвинуто предложение отправить на Марс автономный ровер вместе со стационарным марсианским модулем. Запуск запланировали на 2011 год, а в качестве ракеты для вывода аппарата в космос собирались использовать российский «Союз-Фрегат».

В 2009 году к работе над ExoMars присоединилось аэрокосмическое агентство NASA, а от российских ракетоносителей решено было отказаться в пользу европейских Atlas V. Тогда же стало понятно, что за один раз доставить к Марсу как разведывательный орбитальный аппарат, так и марсоход не получится из-за чрезмерно высокого общего веса.
NASA должно было взять на себя множество технологических аспектов, в частности, предоставить для миссии посадочную систему «Sky Crane». Однако в феврале 2012 года американское агентство вышло из программы ExoMars из-за проблем с федеральным финансированием. В ESA, тем не менее, не растерялись и быстро нашли нового партнера в лице Роскосмоса.
Trace Gas Orbiter
На каждой из стадий своего развития, через которые прошел ExoMars, неизменным оставалась роль орбитального разведчика TGO в марсианской миссии. Главная задача, стоящая перед TGO, заключается в анализе марсианской атмосферы. Аппарат будет составлять карту концентрации и источников метана, динамика которых, по мнению некоторых ученых, может свидетельствовать в пользу наличия органической активности на Марсе, а также других газов и химических соединений (к примеру, водяного пара, озона, оксидов азота и углерода)

Однако одной лишь разведкой марсианской атмосферы обязанности орбитального аппарата TGO не ограничены: не менее важная функция, которую будет выполнять установленное на нем оборудование – это создание активного канала связи между демонстрационным модулем EDM и научными центрами на Земле.

Более того, специалисты, работающие над проектом ExoMars, делают ставку на продолжительный срок службы TGO, поскольку именно с его помощью можно будет найти подходящее место для посадки ровера (вероятнее всего, в 2019 году), а также обеспечить его связью с Землей. Возможно, TGO будет участвовать и в других марсианских миссиях вплоть до 2022 года. Кроме того, новый европейский орбитальный комплекс, оснащенный помимо телекоммуникационного оборудования целым набором спектрометров и камер, сможет дублировать находящийся с 2006 года на орбите Марса американский многофункциональный исследовательский аппарат Mars Reconnaissance Orbiter (MRO).
Entry, Descent and Landing Demonstrator Module
Как уже было сказано выше, в 2016 году к Марсу орбитальный разведчик TGO отправится не один. К нему будет прикреплен демонстрационный спускаемый модуль EDM, в подготовке к посадке которого на поверхность Марса ученые из команды ExoMars планируют «отточить» технологии, необходимые для удачной реализации миссии 2018 года.

После входа в атмосферу Марса модуль раскроет свой парашют и завершит «приземление» на поверхность планеты, используя собственную автономную навигационную систему (систему замкнутого цикла). Первоначальная скорость падения модуля – в момент его вхождения в марсианскую атмосферу – будет достигать почти 21000 км/ч, и всего за 8 минут она снизится до 15 км/ч. EDM совершит полу-жесткую посадку с помощью кластера компактных жидкостных реактивных двигателей, переведенных бортовым компьютером в импульсный режим работы для дополнительного реверсивного торможения.

Предполагается, что местом посадки модуля станет марсианское плато Meridiani, расположенное близко к экватору. На это, одно из наиболее ровных плато на Марсе в 2004 году спустился ровер «Opportunity». Как ожидают специалисты, посадку удастся осуществить в тот период, когда в этом регионе начинаются так-называемые «пыльные (или песчаные) бури».

Сразу после приземления модуль приступит к изучению параметров атмосферы у поверхности: скорости и направления ветра, а также давления, влажности, температуры и прозрачности атмосферы. Для этого на EDM на Земле установят метеорологический комплекс DREAMS (Dust Characterisation, Risk Assessment, and Environment Analyser on the Martian Surface – оборудование для изучения пыли, оценки рисков и анализа окружения у поверхности Марса).

EDM, помимо атмосферного анализа, займется исследованием электромагнитных полей местного происхождения. Считается, что электростатические и магнитные силы оказывают серьезное воздействие на механизм образования марсианских пыльных бурь. Измерения влажности прольют свет на неизученное пока явление электризации марсианской пыли. Наконец, EDM оснастят и системой цветных камер, изображение с которых будет транслироваться на Землю через канал связи, организованный орбитальным модулем TGO.

По разным данным, демонстрационный спускаемый модуль сможет функционировать в течение периода от четырех до восьми сол (марсианских дней). Структурная модель EDM уже проходит тестирование в ESTEC, техническом центре ESA, в Нордвейке с начала апреля.
ExoMars Rover
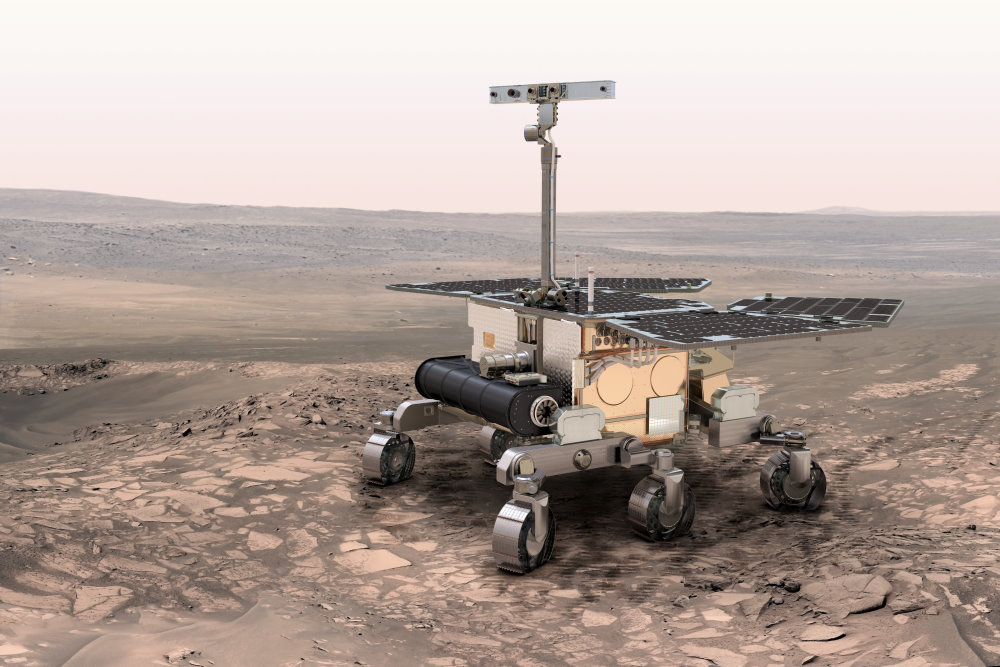
Если первый этап миссии ExoMars пройдет успешно, в 2018 году состоится запуск космического комплекса с ровером на борту. Российская сторона должна подготовить систему, отвечающую за спуск и приземление марсохода. Сам «ExoMars rover», а также часть его начинк в рамках совместной программы предоставит ESA.
Первоначальный дизайн ровера предполагал создание 300-килограммового роботизированного аппарата, превосходящего размерами MER Spirit и Opportunity. Однако после выхода NASA из проекта в ESA решили перейти к более компактному 200-килограммовому варианту. Впрочем, ровер сохранит все важнейшие способности, необходимые для выполнения своей марсианской миссии: хорошую мобильность и проходимость, автоматический сбор и исследование образцов, автономную навигацию.
Поскольку управлять марсоходом в ручном режиме из-за гигантского расстояния, разделяющего Марс и Землю, не представляется возможным, ровер будет самостоятельно составлять маршрут своего движения, просчитывая наиболее безопасную траекторию в процессе обработки поступающих в бортовой компьютер данных об окружающем пространстве.
На ExoMars Rover смонтируют панорамную стерео-камеру, которая позволит роверу строить трехмерную виртуальную карту марсианской поверхности, а для того чтобы гарантированно избегать столкновений с препятствиями, марсоход будет использовать дополнительную камеру с малым фокусным расстоянием. Для упрощения ориентации в пространстве и определения своего абсолютного положения относительно других космических объектов (в первую очередь, Земли) в аппаратную начинку ровера добавят гироскопы и сенсоры солнечного света.
Подобно другим марсианским роверам, аппарат оснастят солнечными панелями для генерации электрической энергии, а холодные марсианские ночи роверу помогут пережить «инновационные аккумуляторы» и тепловые устройства. Минимальное время активной «жизни» ExoMars Rover на Красной планете оценивается в 218 сол, при этом за одни марсианские сутки ровер будет продвигаться примерно на сотню метров.
Шасси существующего прототипа ровера включает в себя три пары колес, каждая из которых имеет собственную подвеску, а любое из шести колес способно вращаться независимо от других. Такая конструкция открывает для ровера возможность занимать удобное положение относительно неровностей ландшафта благодаря имитации «шагающих» движений. Часть своего пути ExoMars Rover будет прокладывать по мягкому, песчаному грунту марсианских дюн.
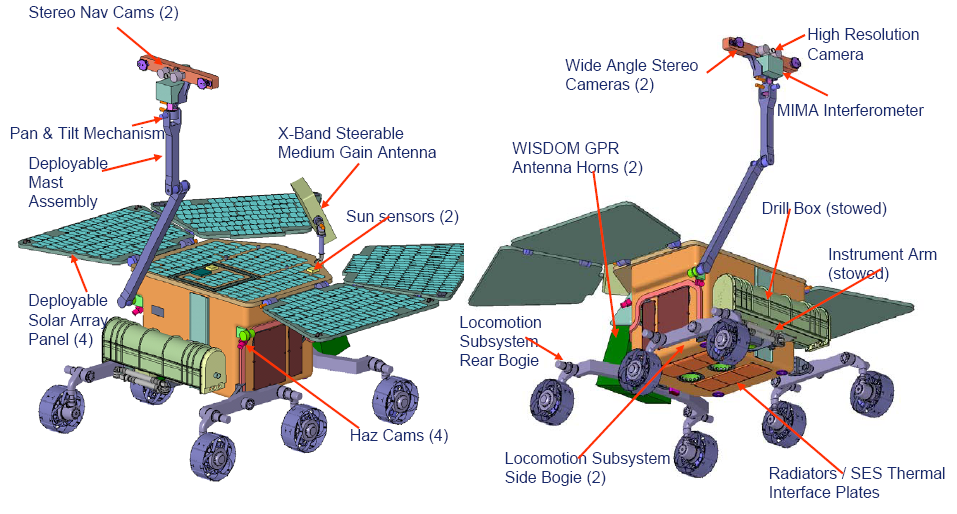
Так же, как и другие марсианские роверы, марсоход для миссии ExoMars оборудуют бурильной установкой, которая сможет извлекать образцы местных пород с глубины до двух метров и затем помещать их в бортовую мини-лабораторию для физического и химического анализа. Мини-лаборатория включает в себя несколько различных инструментов, в том числе спектральные анализаторы, предназначенные для поиска и идентификации органических соединений и так называемых «био-маркеров», обнаружение которых является заветной мечтой любого исследователя Марса.
.jpg)
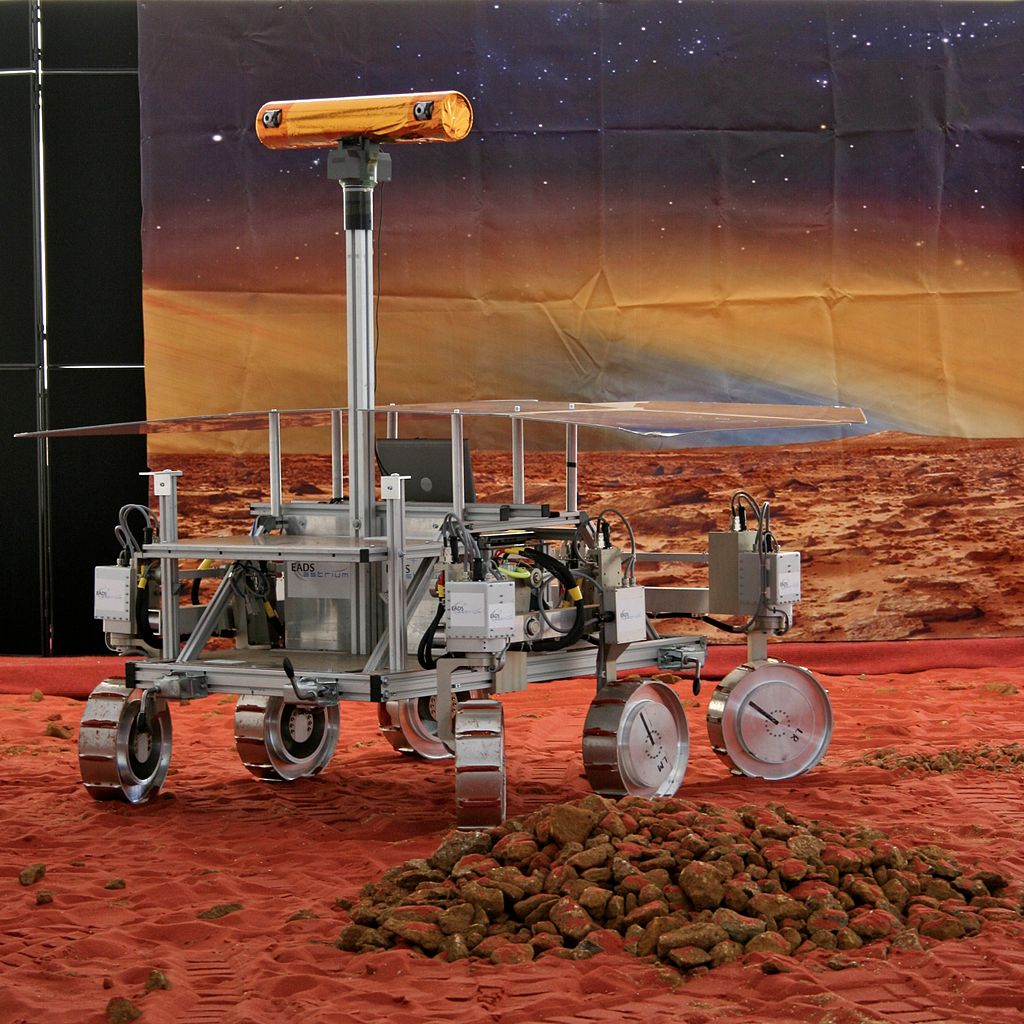
Прототип системы PanCam (во время испытаний в условиях, приближенных к марсианским)
Подходящие места для бурения будут определять специалисты на Земле, изучая визуальные данные, которые предоставит им оптическая система PanCam (Panoramic Camera). Главные ее компоненты – это две широкоугольные камеры, позволяющие получать стерео- и трехмерное изображение марсианской поверхности в зоне пребывания ровера. С помощью камер ученые планируют анализировать текстурные особенности твердых объектов, вроде необычных включений, которые можно интерпретировать как следы древней биологической активности.

На нижнем изображении (под фотографией) представлена виртуальная трехмерная карта участка поверхности, полученная при помощи прототипа системы PanCam
Кроме того, система PanCam будет снимать участки труднодоступных мест, включая кратеры и отвесные скалы. А для изучения объектов, расположенных в непосредственной близости к аппарату, ровер станет использовать камеру CLUPI (Close - UP Imager) с механизмом авто-фокусировки. Эта камера, способная вести съемку в высоком разрешении (7 нанометров на пиксель на расстоянии в 10 см), даст исследователям детальные цветные изображения минеральных образцов, добываемых бурильной установкой, и других предметов, которые заинтересуют земных специалистов.

Система ближней съемки CLUPI
Однако камерам практически недоступно то, что скрыто «под землей». Да и бурение – удовольствие дорогое как в плане времени, так и в плане расхода энергии, поэтому на ExoMars Rover разместят аппаратуру для радиолокационного зондирования. Георадар WISDOM (Water Ice Subsurface Deposit Observation on Mars, то есть «радар для поиска запасов водяного льда в верхнем слое марсианской поверхности») предназначается для анализа структуры и состава местных пород неглубокого залегания, расположенных по пути движения ровера, с помощью высокочастотного излучения.

Стратиграфическая карта, составленная георадаром GPR (Ground Penetration Radar)
Как заявляют разработчики радара WISDOM, он позволит заглянуть вглубь Марса на расстояние от 3 до 20 метров в зависимости от характера пород. Помимо этого устройства в состав оборудования марсохода должны включить российскую разработку - ADRON-RM, детектор нейтронов, который будет искать содержащие водород соединения вроде водяного льда, адсорбированной местными породами воды, а также молекул OH/H2O, содержащихся в гидратах.
Впрочем, чтобы аппараты, которые создаются командой проекта ExoMars, могли приступить к изучению Марса, необходимо их сначала туда доставить. Они смогут покинуть пределы Земли благодаря российским ракетам-носителям (РН) тяжёлого класса «Протон-М», которые Россия обязуется предоставить для первого запуска в 2016 и для запуска модуля с ровером на борту в 2018 году.
Специально для InFuture.ru
Комментарии:
gend Исследование и колонизация Марса являются важнейшими проектами в новейшей истории человечества. Но только ли NASA под силу столь грандиозные задачи?
Красиво, познавательно, обильно иллюстрировано... но слишком мнгобукоффф, к концу статьи внимание рассеивается. И "7 нанометров на пиСкель..." как-то своеобразно выглядит )))

gend Исследование и колонизация Марса являются важнейшими проектами в новейшей истории человечества. Но только ли NASA под силу столь грандиозные задачи?
Мне очень понравилась статья. О ExoMars столько написать, я в интернете и не видел столько подробностей о нем. Пиши у нас больше Саш, таких статей бы побольше.
barbudgend Исследование и колонизация Марса являются важнейшими проектами в новейшей истории человечества. Но только ли NASA под силу столь грандиозные задачи?
Красиво, познавательно, обильно иллюстрировано... но слишком мнгобукоффф, к концу статьи внимание рассеивается. И 7 нанометров на пиСкель... как-то своеобразно выглядит )))
ПиСкель поправили)

Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Арены будущего: 3 крутых проекта футбольных стадионов в Саудовской Аравии
В Populous утверждают, что для нового проекта вдохновлялись пейзажами Саудовской Аравии. Дизайн напоминает форму семени, прорастающего в пустыне.

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.
Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Причины роста популярности Астрономии и Космоса среди молодого поколения
Астрономия и космос всегда привлекали внимание людей всех возрастов, но особенно ярко эта наука проявляется среди молодого поколения.
На далекой планете обнаружены намеки на жизнь
Данные космического телескопа Джеймса Уэбба (JWST) показали, что у экзопланеты вокруг звезды в созвездии Льва есть химические маркеры, которые на Земле связаны с живыми организмами. Но это смутные указания. Так насколько же вероятно, что на этой экзопланете обитает инопланетная жизнь?

Хищна черная дыра поедает звезду огромными кусками
Расположенная в соседней галактике солнцеподобная звезда постепенно съедается небольшой, но прожорливой черной дырой, теряя при каждом сближении с ней массу, эквивалентную трем Землям.
