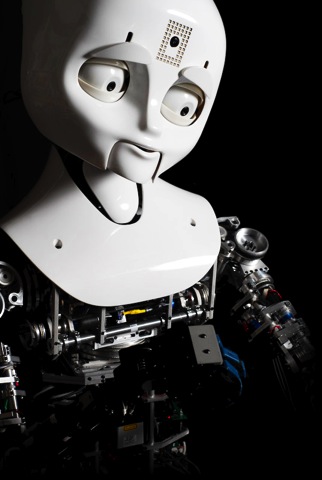
Робот то грустит, то веселится, и постоянно жестикулирует


Ученые продолжают раздвигать границы искусственного интеллекта, задействуя роботов и компьютерный АІ во все более сложных и разнообразных ситуациях.
Многие обозреватели робототехники и искусственного интеллекта, такие как сооснователь Apple Стив Возняк, скептически настроены в отношении способности роботов когда-либо начать выполнять человеческие задачи или же вступать в социальное общение с человеком.
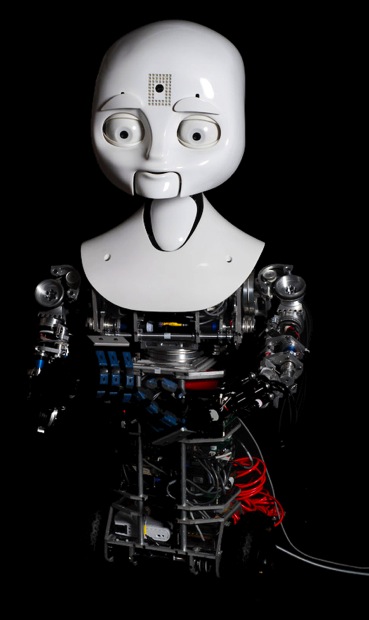
Но лучше раз увидеть, чем сто раз услышать, и видеозапись от MIT наводит на мысль о том, что ученые в MIT Media Lab гораздо ближе к реализации социальной части, чем представлялось до сих пор. Продуктом лабораторной команды по руководством д-ра Синтии Бризил стал человекоподобный робот по имени Некси, сопровождающий свою речь сложными движениями рук и мимикой.
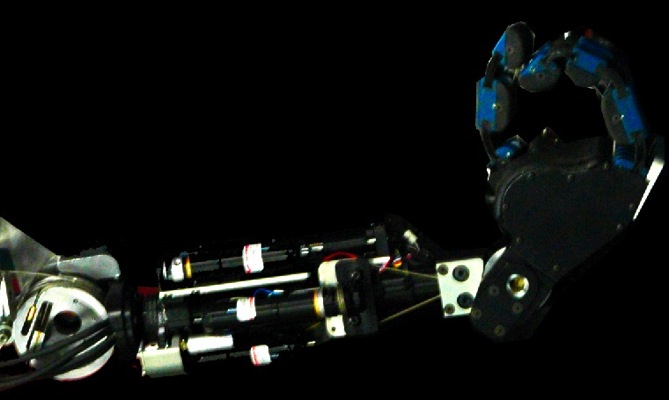
Некси — MDS, т.е. mobile dexterous social robot, подвижный социальный робот с руками-манипуляторами. Ездит робот на колесах. Его ходовая часть сбалансирована наподобие Сегвея, а скорость сравнима со скоростью пешехода.
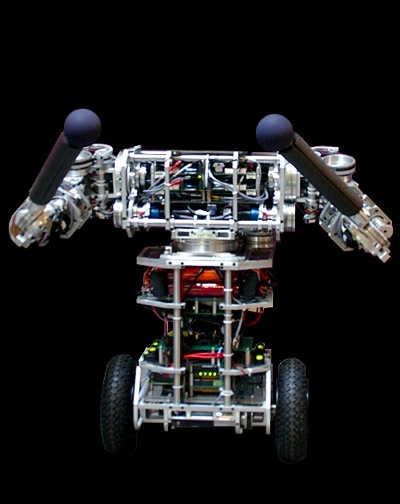
У робота две необычайно ловких руки. Каждая из рук имеет четыре степени свободы, эластична и сонована на дизайне DOMO/WAM. Положение рук и их усилие управляются через контроль усилия. Полностью вытянутыми обеими руками робот может поднять объект весом до 4,5 кг. Несколько роботов могут «объединить усилия», чтобы поднять более тяжелые объекты. Плечевое шасси смонтировано на штифт в торсе, предоставляя роботу полную свободу движений.
Моторы контролируются цифровым сигнальным процессором и программируемой вентильной матрицей, а контроль над равновесием и приложением усилия осуществляет встроенный ПК с ОС Linux, располагающийся ближе к основанию. ПК имеет беспроводную связь. Для того, чтобы объезжать препятствия, используется лазерное видение.
Одной из самых своеобразных особенностей робота являются руки. У предплечия пять степеней свободы. Оно может вращаться и изгибаться в кисти, подобно человеческому предплечию. На каждой руке по три пальца, а напротив них — еще по одному большому. Указательный и большой пальцы управляются индивидуальной, а средний с безымянным сгрупированны вместе. Робот может брать предметы или жестикулировать, передавая эмоции. Руки разработаны компанией Meka, Inc., с участием MIT.
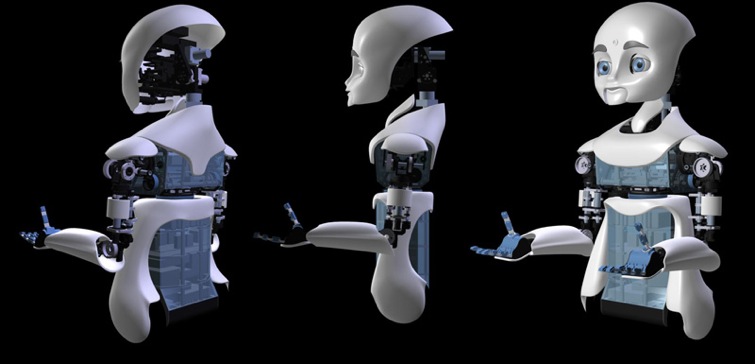
Самая же интересная и шокирующая часть Некси — его выразительное лицо. Его разработали совместно Xitome Design и МІТ. Шея с четырьмя степенями свободы, а панорамно-поворотная посадка головы позволяет совершать движения, похожие на человеческие. Голова может кивать, качаться, или «осматриваться».
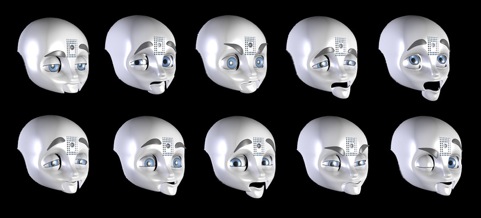
У лица 15 степеней свободы, выразительные брови, взгляд, веки и нижняя челюсть. В каждом глазе встроена цветная камера, кроме того, в голову встроена инфракрасная камера. Четыре микрофона позволяют роботу локазовать звук, а еще один используется для распознания речи. Громкоговоритель позволяет синтезировать речь.

Практическая премьера робота состоится летом 2009 года. В течение двух недель робот будет взаимодействовать с посетителями Бостонского музея науки в своей «игровой комнате». Он будет занимать слушателей беседой и выражать эмоции. Во время этого взаимодействия робот постарается научиться беседе и новым моделям поведения. Иногда операторы MIT будут управлять роботом дистанционно, чтобы испытать более сложные модели поведения или избежать скуки в беседе. Робот умеет выражать огорчение, гнев, недоумение, восторг, скуку и многие другие эмоции.
На видео Некси самостоятельно демонстрирует свои базовые разговорные данные, приветствуя зрителя и сообщая ему: «Надеюсь, вы заметили, что я очень рад познакомиться с вами. Спасибо, что посетили меня и до скорой встречи!»
Комментарии:

"Одной из самых своеобразных особенностей робота являются руки. У них пять степеней свободы."
Так 4 или 5? =)
А робот прикольный, заметен существенный прогресс :)

Полет к Луне. Первая лунная миссия в наше время — Artemis II.
Artemis II, Orion, SLS, Apollo, Saturn-5, Moon, NASA, ESA

Арены будущего: 3 крутых проекта футбольных стадионов в Саудовской Аравии
В Populous утверждают, что для нового проекта вдохновлялись пейзажами Саудовской Аравии. Дизайн напоминает форму семени, прорастающего в пустыне.

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.

Техника Lenovo: надежность и долговечность при эксплуатации
Покупка технического устройства - это процесс, в котором важно учитывать различные нюансы, напрямую связанные с базовыми характеристиками приспособления и его функциональностью.

Лучшие модели наушников JBL: обзор и характеристики
JBL наушники широко известны высоким качеством звука и надёжностью, благодаря чему они завоевали доверие различных категорий пользователей — от меломанов до спортсменов.

e-Learning в цифрах: 6 общих фактов, много данных и прогнозы на ближайшее будущее
e-Learning – это обучение с помощью цифровых технологий (Интернета, электронных устройств и специальных программ). Процесс можно организовать в аудиториях или удалённо, одновременно для целой группы или по гибкому графику для каждого.
Компьютерный чип со встроенной тканью человеческого мозга получает финансирование от военных
В прошлом году ученые из Университета Монаша создали «DishBrain» — полубиологический компьютерный чип, в электродах которого в лаборатории выращено около 800 000 клеток мозга человека и мыши. Демонстрируя что-то вроде разума, он научился играть в пинг-понг за 5 минут.
